对于光纤内窥系统而言,真正受限制的往往不是近端仪器,而是远端探头的光学自由度。相干光纤束能够保持空间采样关系,把远端强度图像送回相机;但若要进一步获得角度扫描和距离测量,系统必须为光束控制和回波探测预留新的通道。如何把这些功能压缩到光纤端面,是微型光学系统设计中的关键问题。
已有光纤束成像主要围绕二维强度传输展开。全彩图像可以通过宽带照明和相机采集获得,但主动三维信息通常需要单色脉冲、扫描控制和时间探测。两类过程在光源、探测方式和波前需求上并不相同,如果沿用分立光路思路,远端结构会迅速复杂化。
超构表面的价值在于把波前函数写入亚波长结构。一个平面器件可以在微米尺度厚度内实现聚焦、偏转和相位整形,为光纤端面集成提供了更高自由度。但要把全彩成像和ToF深度感知放在同一根光纤中,关键不只是缩短焦距,而是让同一超构器件在不同传播方向上承担不同功能,即实现所谓的Janus功能。
南京大学徐飞教授和王漱明教授联合团队提出的Janus超构光纤正是围绕这一思路构建。系统正向工作时收集目标反射的宽带可见光并形成二维彩色图像,反向工作时将近端调制的532 nm脉冲光转换为大角度扫描光束,并通过回波飞行时间恢复深度。南京大学徐浩天博士(已毕业)和香港科技大学李添悦研究员为共同第一作者,南京大学王漱明教授和徐飞教授为共同通讯作者,论文题为“Full-color 3D visualization with Janus metafiber”,发表于Nature Communications。
一、系统双向光路配置
该Janus超构光纤系统的出发点,是把颜色图像和距离读出分配给相反的传播方向。光从目标返回时,探头执行二维成像;光从近端发往目标时,探头执行主动扫描。由于两种状态按时间切换,端部不必同时放置多套微型光路。
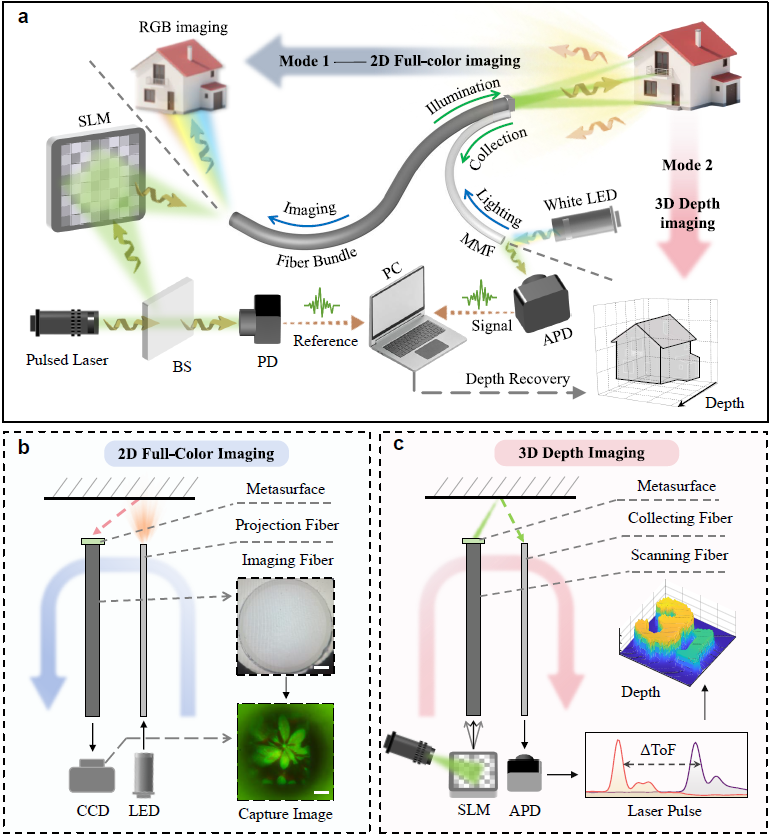
图1 | Janus超构光纤的系统原理。正向链路利用白光照明、端面超构表面和相干光纤束完成全彩二维成像;反向链路利用532 nm脉冲激光、空间光调制器和ToF探测实现主动深度采集。
在正向模式中,多模光纤把白光LED传输到远端照明目标。目标反射光经过二次相位超构表面后,被聚焦到相干光纤束端面,再传回近端CCD相机。由于使用宽带照明,这一路径可以获得目标的全彩二维图像。
在反向模式中,532 nm脉冲激光先在近端被空间光调制器编码为不同位置的光斑。这些光斑沿相干光纤束到达端面,经同一块超构表面变为不同方向的准直出射光。目标回波由多模光纤接收,并送入雪崩光电探测器,最终根据飞行时间差计算距离。
这种光路安排把“看颜色”和“测深度”分配到两个传播方向,而不是在远端添加两套光学系统。对于超细探头而言,减少远端元件数量本身就是一种重要的系统收益。
二、端面二次相位器件
Janus超构光纤能够实现双向功能,关键在于端面二次相位超构表面。它在正向光路中提供聚焦,在反向光路中提供从端面位置到远场角度的映射。因此,同一几何相位分布在两种传播方向中对应不同的系统任务。
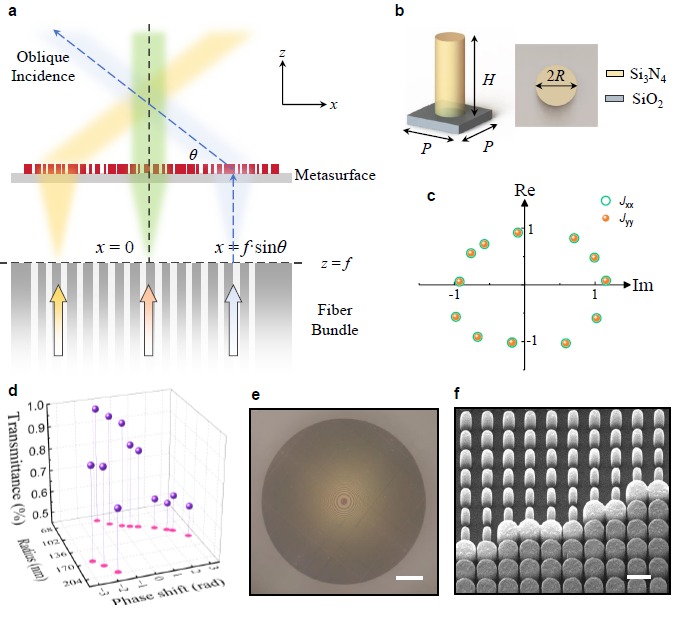
图2 |二次相位超构表面的设计和加工。纳米柱半径决定相位响应,氮化硅/二氧化硅材料体系用于构建高透过率平面器件;该结构在正向负责聚焦,在反向负责光束偏转和扫描角放大。
图2给出了器件的结构参数和加工结果。超构表面由氮化硅纳米柱阵列构成,基底为二氧化硅。改变纳米柱半径即可调节相位响应,使器件在目标波长附近覆盖接近完整的2π相位范围。
其几何尺寸也与光纤束匹配:直径和焦距均约为600 μm,数值孔径约0.4。这个尺度既保证了正向成像时的收光和聚焦,也为反向扫描提供了足够的角度范围。图中的显微和电镜结果表明,设计的纳米柱阵列已经被实际制备到端面器件中。
对正向成像而言,宽带性能是必须检验的指标。纳米结构相位响应随波长变化,若色散过强,红、绿、蓝三个通道会出现不同程度的模糊或偏移。
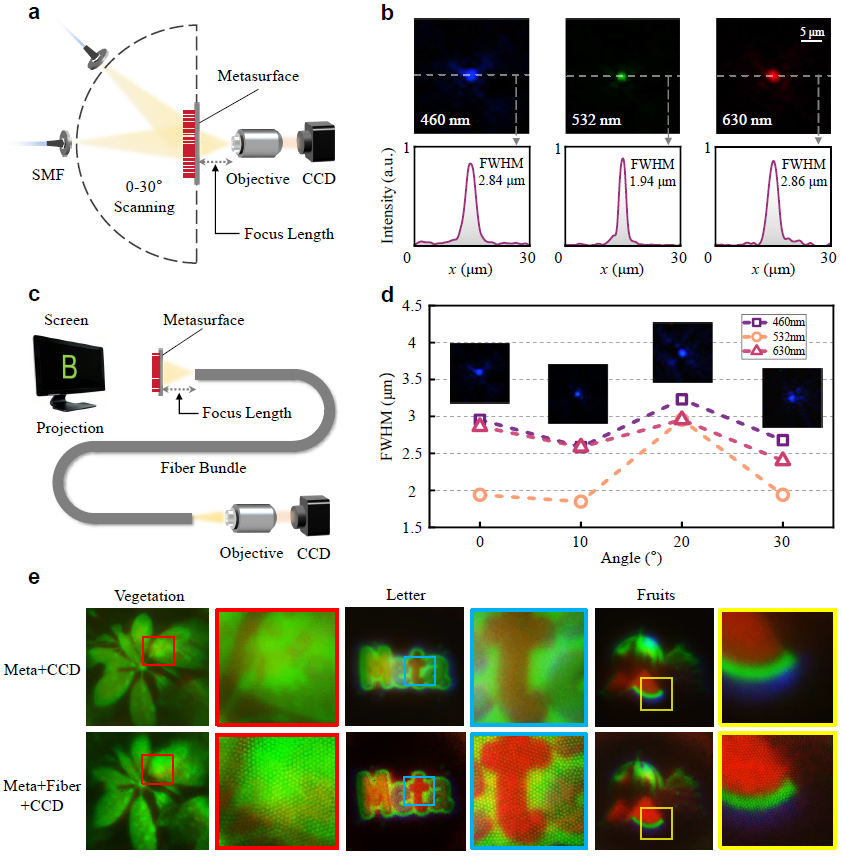
图3 |正向通道的宽带成像实验。论文测量了460 nm、532 nm和630 nm下的点扩散函数,给出不同入射角下的FWHM变化,并展示了超构表面直接成像及其与光纤束结合后的全彩图像。
图3显示,在0°入射下,460 nm、532 nm和630 nm对应的焦斑半高全宽分别约为2.84 μm、1.94 μm和2.86 μm。入射角变化到30°时,焦斑仍保持可识别形态,说明器件可支持约60°总视场。
在实际彩色成像测试中,加入光纤束后图像出现了典型的纤芯采样纹理,但主要色彩和空间结构仍被传输到近端。这说明该端面超构表面不仅能在单色下工作,也能在全彩二维成像中提供可用的波前控制。
三、反向扫描与全彩三维重建
反向通道关注的是另一个问题:如何不用远端机械结构实现扫描。论文采用近端空间光调制器控制光纤束端面光斑的位置,再利用二次相位超构表面把位置变化转换为角度变化。
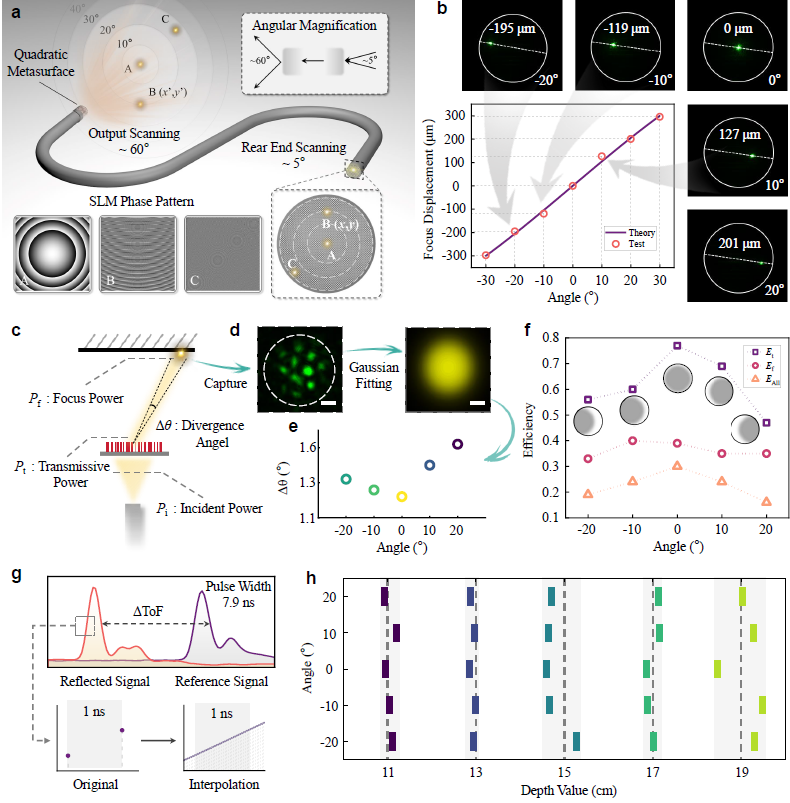
图4 |反向光路的扫描和深度测试。端面光斑位移与出射角满足Δx = f sinθ,实验同时给出了扫描发散角、效率随角度变化以及基于脉冲回波的ToF深度标定。
如图4所示,光斑横向位移Δx和扫描角θ满足Δx = f sinθ。实测数据与理论关系吻合,证明该端面器件可以完成从近端坐标到远端角度的映射。系统实现了约60°反向扫描视场。
光束质量方面,不同扫描角下的发散角约为1.2°至1.6°,整体低于2°。效率测试显示,大角度时透过率和总效率下降,而聚焦效率相对稳定,说明波前功能仍然成立,性能变化主要来自有效孔径和收集信号的变化。
ToF测距部分使用脉宽约7.9 ns的532 nm脉冲激光。由于时间采样会限制深度判读,作者对脉冲上升沿进行正弦插值,并以上升沿半高位置作为时间参考。在10 cm至20 cm范围内,系统完成了2 cm间隔的深度标定,并在不同角度下保持稳定恢复。
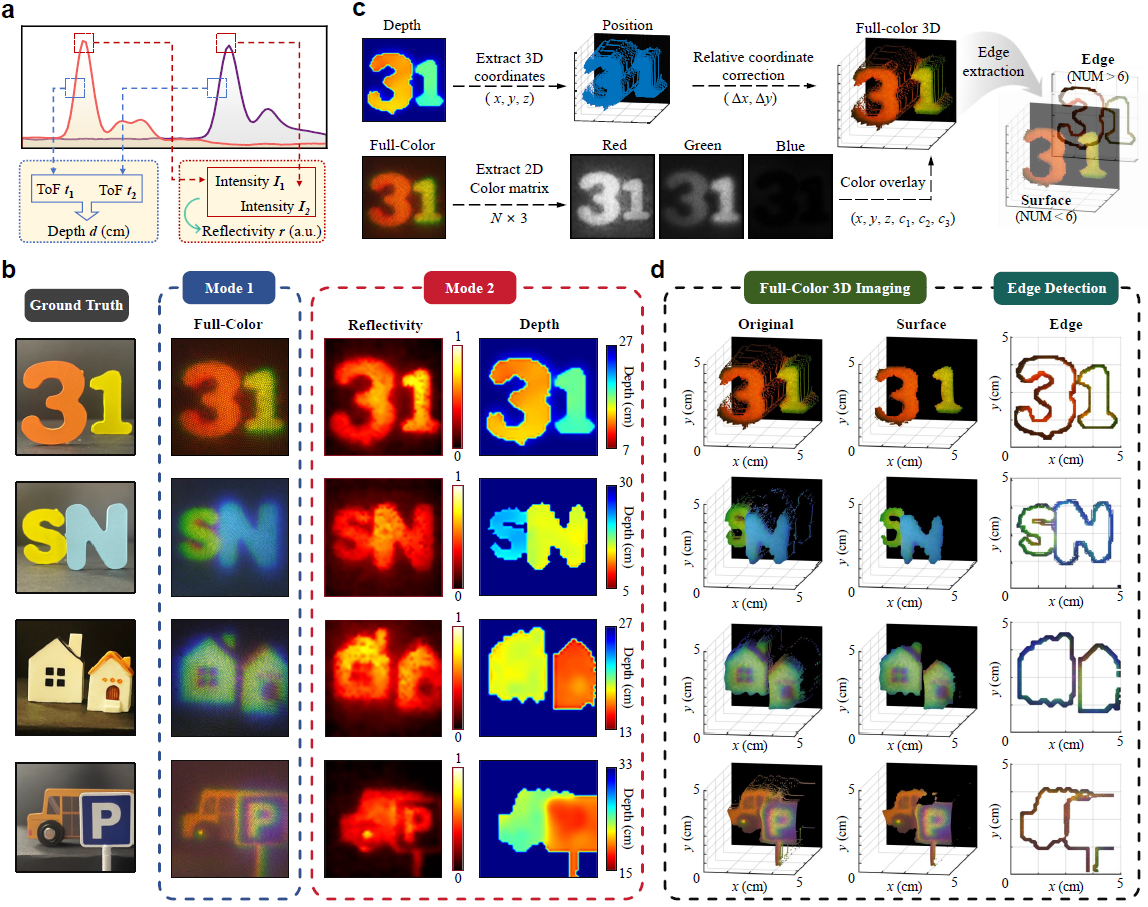
图5 |双模态数据融合为全彩三维结果。反向ToF提供深度和反射率,正向RGB图像提供颜色纹理;通过三维坐标恢复、相对配准和颜色映射,系统得到全彩点云,并利用深度梯度提取边缘。
图5将两种工作模式的输出合并起来。反向回波的时间差对应深度,回波强度对应532 nm下的反射率;正向通道则提供RGB颜色矩阵。通过坐标恢复和图像配准,颜色被映射到三维点云上。
实验中,反向扫描得到约50 × 50采样阵列,覆盖约5 cm × 5 cm视场。作者对深度图和反射率图进行上采样,并采用双边滤波抑制孤立噪声。数字、字母、房屋、校车和停车标志等目标均被重建为带颜色纹理的三维结果。
图5还展示了边缘提取功能。物体边界处常出现目标和背景共同贡献的混合回波,导致相邻点深度突变。利用这一特征,系统可以把表面区域和轮廓边界区分出来,为后续形貌识别提供额外信息。
从光学设计角度看,这项工作的重点在于把端面超构表面从“微型透镜”推进为“方向复用的波前处理器”。同一器件在正向负责宽带成像,在反向负责角度映射和扫描输出,随后通过ToF读出获得深度。
论文验证了约60°视场、小于2°扫描发散角、全彩二维成像、反射率/深度读取和全彩三维点云生成。相关思路可延伸到光纤LiDAR、紧凑型三维视觉探头、在线检测、微型机器人视觉和受限空间感知等方向。
该研究得到国家重点基础研究发展计划、国家自然科学基金、量子科技国家重点研发计划、江苏省自然科学基金以及香港RGC等项目支持。
论文链接:https://www.nature.com/articles/s41467-026-74131-8

